Under Review, 2026
I'm interested in how machines come to understand and represent the physical world, and how they can build on that to generate and act in it. I'm a first-year M.S. researcher at KAIST CVLAB. My research so far has centered on multi-view diffusion and 4D generation, and I'm now starting to explore 3D foundation models for robotics. Reach me at seonghu.jeon@kaist.ac.kr.

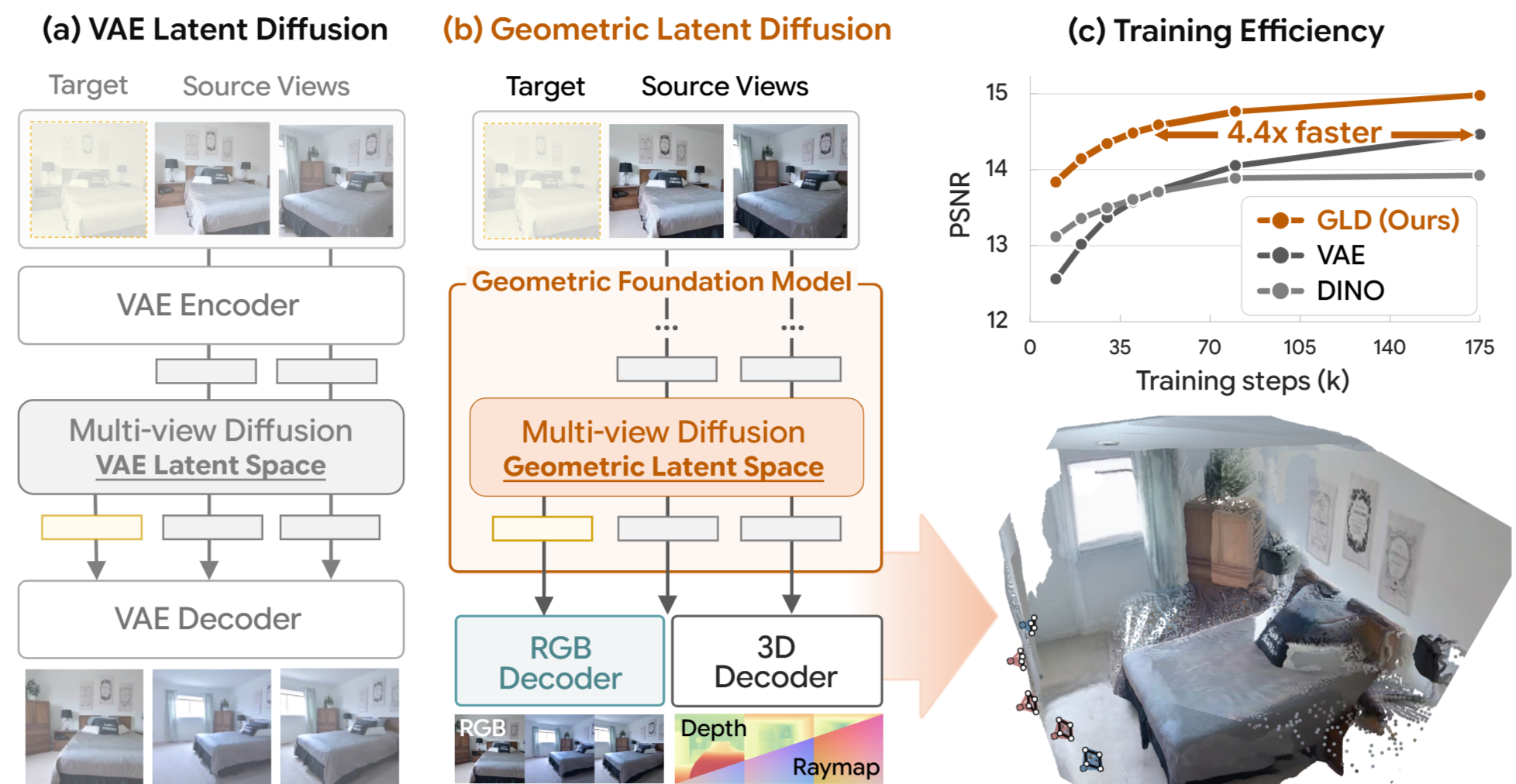
Reconstructing static and dynamic scenes from sparse views — how foundation models trained on geometry transfer to view-synthesis without optimization.
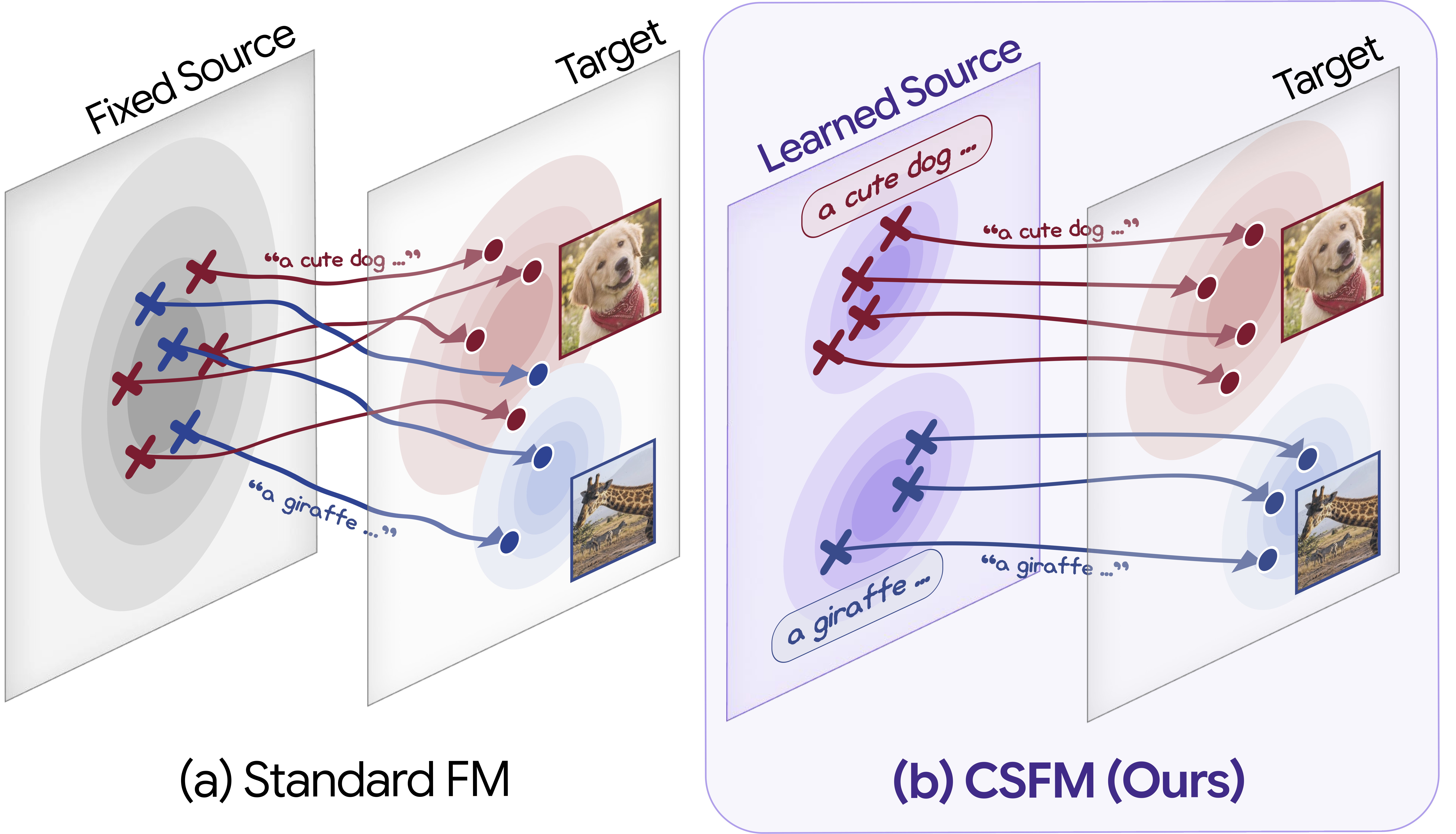
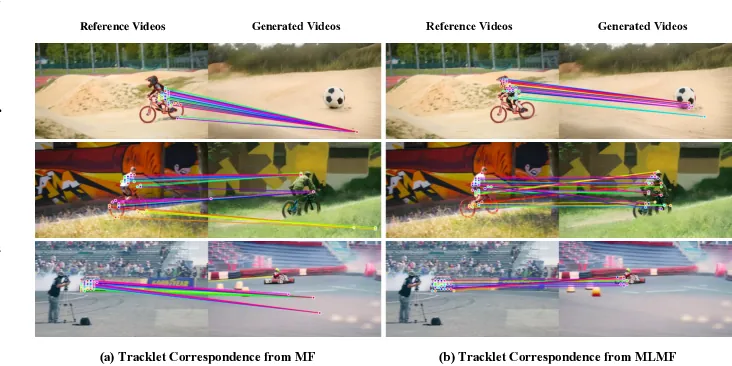
Diffusion and flow matching with structured conditioning — correspondence, geometry, motion. Architecture work and better source distributions.
The destination. If a robot can imagine a scene's geometry forward in time, it can plan in it — and that loop closes through generative models.